

Essi Ryymin, Milan Gautam & Tapio Väisänen
Manufacturing companies need to constantly evolve their production systems and accommodate the changing demands of markets in order to maintain their competitiveness in a globalized environment. Currently, manufacturing is going through a paradigm shift from mass production to mass customization of products. Impact of this paradigm shift on production systems is that they should adapt to handle more product variation, smaller life cycles, and smaller batch sizes. (Pedersen et al., 2016, p. 282)
The increasing need for more flexible and agile manufacturing equipment has spawned a growing interest in collaborative robots that are intended for operating alongside the production personnel in dynamic or semi-structured human environments. (Schou et al., 2018, p. 72)
Robotics is expected to be one of the main enablers of this development to the transformable factory. To reach the demanded level of flexibility robots need to be able to move autonomously, cope with uncertainty in interactions with humans, handle a variety of different tasks, and be able to be reprogrammed fast by non-robot experts when a new task in the factory arises. (Pedersen et al., 2016) Collaborative robots era robots are not considered a bulky piece of machinery in the production line, instead, they actively share the workspace with human workers. They can work safely alongside humans without fences, improving the production flow and allowing the automation of new processes. (Schou et al., 2018, p. 72). According to Schou (2018, p. 79) and his team of the research of the skill-based programming of collaborative robots, they are easy to use and program to industrial tasks even by robotic novices. However, the instructions and the robot intentions must be clearly communicated during the training, particularly in challenging tasks, and users need more frequent assistance e.g. in positioning the robot arm or in the steps in the setup process.
Also Vivo, Zanella, Tokcalar, and Michalos (2017, p. 371) found out in their ROBO-PARTNER-project that rather than using a brute force approach to automate the relevant assembly processes, collaborative robot promotes a hybrid solution involving the safe cooperation of human operators with adapting robotic systems through a user-friendly interaction.
Collaborative robot, abbreviated as cobot, was first introduced by Colgate, Edward, Peshkin, and Wannasuphoprasit (1996). They defined the term cobot as the robotic device which manipulates objects in collaboration with a human operator. Today cobots are the specifically designed robots for human-robot collaboration. They gave new dimension of increasing productivity in industrial world. They are believed to be the gateway towards industry 4.0 implementation and drive factors for fourth industrial revolution of the world. There is a wide range of definitions for the collaborative robot in industry but in this context, cobot refers to collaborative type of an industrial robot, manipulator or arm.
The collaborative robot technology got accelerated when universal robots introduced UR5, a five kg collaborative robot in the market (Universal robots, 2019). Following the succession, the traditional industrial robot manufacturers like Kuka, Fanuc, ABB, and Yaskawa came up with their own collaborative robots (Kuka, 2019; Fanuc robot products, 2017; ABB, n.d.; Yaskawa, 2019). The rise of collaborative robots means that research units and educational organizations should increase their use and evaluate the importance of educating and training future workforce on the technology. These institutes have vital responsibility towards introducing and promoting future technologies to local industries to open the path of change and keep development pace with rest of industrial world.
Context of the study
This research was conducted within the Y-robo project, which was led by HAMK Tech Research Unit of School of Technology of Häme University of Applied Sciences (HAMK) and funded by Häme regional council. Project duration was one year, from April 2018 to April 2019.
For strengthening the multidisciplinary data gathering and expanding perspectives to learning across boundaries between companies and educational institution, HAMK Tech invited HAMK Edu Research Unit from School of Professional Teacher Education (HAMK, n.d.) to contribute to the process.
Y-robo project was aimed to introduce, experiment and further develop collaborative robots and associated technology with the industries in Kanta-Häme region, and provide continuous learning opportunities to industries. Five (5) industrial experiments and two (2) unique applications from unconventional areas were tested during the project. Industrial experiments were in fields of welding, unpacking, drilling, palletizing and machine loading (see an example in Figure 1). Unconventional areas were agriculture and construction (see Figure 2).


The five (5) industrial cases were aimed to test and further develop collaborative robots under real industrial conditions and in solving real industrial problems. The cases were chosen in cooperation with industry managers and operative workers. The operations at factory environment were examined and cases were chosen based on the highest possible benefits for the industry to use collaborative robot. Proof of concept solutions for the industry cases were then developed at HAMK robotics laboratory, and experimented under industrial conditions in factory floor. The experiments included also brief training sessions of robot set-up and programming, the average duration of the training was around two (2) hours.
The project also organized various pop-up events in several locations in Kanta-Häme for raising public awareness of collaborative robots and transformation of work. In addition, Y-robo blog “Työkaverina yhteistyörobotti” (n.d.) was established to provide information on collaborative robotics technology to project partners and other interested through HAMK University of Applied Sciences blog site.
The objective of the qualitative study
The goal of this study was to acquire information of experiences of testing collaborative robots under real industrial conditions and in solving real industrial problems. There were many company-specific interests and quantitative data, e.g. about productivity, gathered during the testing, that are not reported in this article because of the companies’ anonymity, trade secret and security reasons. However, in this report we will concentrate on open research interest including following questions:
- How workers and supervisors of companies experience collaborative robots? What are the benefits and challenges of collaborative robots?
- What kind of learning process is there in implementing collaborative robots in real industrial environment?
- According to their experiences in the current testing process, what kind of future visions do employees and supervisors in companies have for the use of collaborative robots in future, from long-term perspectives?
Qualitative data gathering
Two (2) of the partner companies in the project were chosen to focus-group interviews. There were three (3) participants in the first focus-group interview of a company and two (2) participants in the second focus-group interview from other companies. In both groups, both employees and supervisors were present and both has contributed to the testing process on operative level. The interviews were carried out after the testing period in the industry and there were two interviewers with diverse background (engineering and education) aiming to reach rich and diverse information. In addition, altogether eight (8) respondents from four (4) different companies filled in an online questionnaire related to testing collaborative robots. The questionnaire included six (6) statements of implementation of a collaborative robot, such as “Collaborative robot enhances the quality of work operations.”
Focus-group interview and data analysis
The semi-structured in-depth interviews in focus groups were carried out in the authentic working environments of the companies. The interviews included themes related to interviewees’ experiences in applying collaborative robots in work operations and the learning and implementation process of the robots. Furthermore, the interview focused on possibilities that collaborative robots may offer for companies and their work operations in future.
Morgan (2002, p. 123) stresses that “sharing and comparing” is a fundamental aspect of interaction in focus-group interviews and an interviewer’s moderating style plays an important role in encouraging interviewees’ sharing and comparing as a form of interaction. When the participants are mutually interested in the discussion, they share their experiences and thoughts, while also comparing their own contributions to what others have said. This process is especially useful for hearing and understanding a range of responses on a topic on debate. The best focus groups thus not only provide data on what the participants think but also explicit insights into why they think the way they do. (Morgan, 2002, p. 123)
Kitzinger (2005) recommends organizing the focus group interviews in small-size groups in order to provide opportunities for each participant to enter the talk frequently and to gain in-depth knowledge of complex phenomena. According to a suggestion by Clark (2006), the interviewers and interviewees also shared a common ground, in this case, testing collaborative robots in industrial settings in companies, so they shared the same knowledge in order to be understood and to accomplish a meaningful conversation.
Focus-group interviews were written down as a raw text during the interviews. The qualitative analysis was done in a team of two researchers discussing and assessing the research process and research results ensuring that no important ideas were lost. The first interpretations of the interviews were made immediately after the focus-group interview, combining the interviewers’ observations from an engineer scientist’s and an educator’s point of view. The collaboration between interviewers also strengthened the joint rationale of analysis and data transparency.
At the first phase, the relevant text in the framework of the theoretical framework and previous research was selected from the raw text for further analysis. The specific concern was paid to so-called “repeating ideas” (Auerbach & Silverstein, 2003, p. 45–46) that were organized into coherent categories. In the last phase, coherent categories were grouped into more abstract themes and concepts. (Auerbach & Silverstein, 2003)
Research results
The analysis of the data revealed three themes: 1) work quality, 2) agile learning and 3) promising future (see Figure 3).
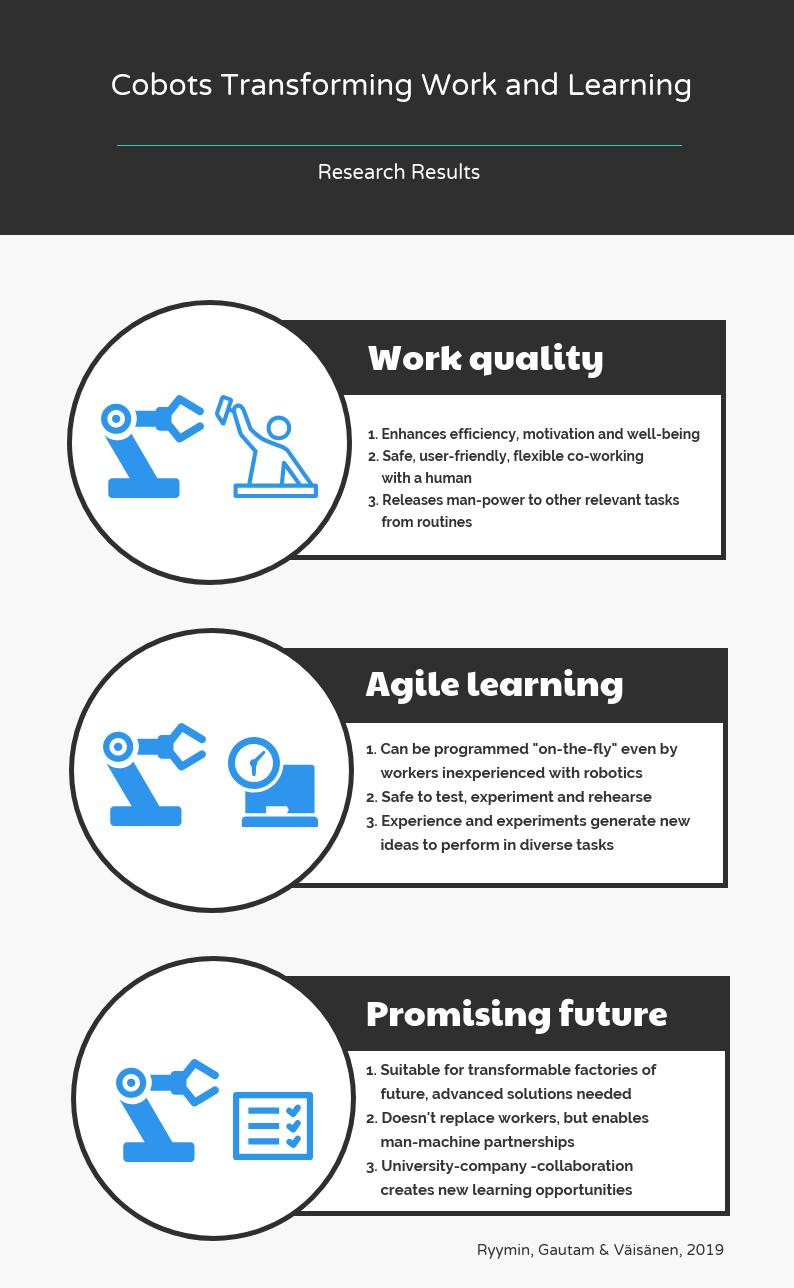
Work quality
The interviewees stressed that the most important experience of applying collaborative robots in work operations in real life industrial setting was its impact to the quality of and conditions of work operations. During the testing, the employees could decrease physically demanding (e.g. heavy, difficult) routines and repeating operations and, instead, release man-power to other relevant tasks. These tasks were mainly more fine-mechanical work operations, which demand e.g. problem-solving skills that a collaborative industrial robot cannot run.
Co-working with a collaborative robot was experienced safe, user-friendly and flexible. The employees expressed that collaborative robots as co-partners in demanding work operations may support well-being and motivation at work in the long run, and hence may even make the career of traditional industry workers more appealing to young professionals and vocational students.
Similarly, the interviewees described that collaborative robots also enhanced the efficiency of working operations in general. Correspondingly, all of the respondents (8) of the online questionnaire agreed with the statement “collaborative robot enhances the quality of work operations”.
Agile learning
The interviewees stated that although the implementation of collaborative robots requires new skills, setting up, programming and testing robots was quite easy. In line with the previous studies (Schou et al., 2018), the interviewees considered that collaborative robots are agile to learn and user-friendly enough to be programmed “on-the-fly” even by employees earlier unexperienced with robotics. They pondered that robots could even be programmed daily or weekly according to the needs and current work processes of an employee.
Here, it’s important to recognize that Häme University of Applied Sciences (HAMK) offered support and guidance in testing operations and taught the basics of robot setups. The companies highly appreciated the partnership with an educational institution in learning and experimenting collaborative robots, in mutual trust and in a reciprocal learning process. They also found very positive that a collaborative robot was safe to study and rehearse by beginners.
The interviewees described that after the working teams had familiarized themselves to the collaborative robots, they also innovated several new ideas to utilize them in work operations. There are many heavy or demanding work operations in which a collaborative robot could be adjusted to offer a helping hand. In line with these study results, also seven of the eight (7/8) respondents to the online questionnaire disagreed with the statement “Implementation of a collaborative robot is demanding”. However, one (1) respondent agreed with the statement.
Promising future
The interviewees speculated that the true impact and new applications of collaborative robots may pop-up in long term testing. The more experiences workers have about collaborative robots, the more they will find needs and ideas for implementing them. Collaborative robots are suitable for transformable factories of future. However, they must be further developed and adjusted in more detail to the specific needs and industrial settings of companies. During the testing, companies recognized several adjustment needs, programming challenges and suggestions for future product development of collaborative robots.
The focus-group interview participants emphasized that, according to their experiences and future visions, collaborative robots are great help to employees, but they don’t replace employees. Human skills and robot guidance are needed in demanding industrial work operations in future too. There were several possibilities seen as future actions in the field of collaborative robotics.
The feedback of collaboration with educational institution from companies was positive. The interviewees reported being content of linking up with research and development with a regional, trustworthy actor sharing similar interests in competence development. Accordingly, Vanhaverbeke (2006, pp. 205–207) has suggested that when developing and absorbing new technologies, or simply to stay in touch with the latest technological development, companies are increasingly forced to team up with other companies and regional innovation systems.
Figure 3. The results of the study revealed that collaborative robots support work quality, are agile to learn and offer a promising future.
Conclusions
The study revealed positive experiences and visions for future opportunities in the use of cobots enhancing industries at Kanta-Häme region. Examining cobots for future investments requires time, resources, learning experiences and objective research interest and methods – the benefits that the regional university of applied sciences, sharing similar interests with industries, can offer to its company partners.
The collaboration between educational institutions and industries encourages continuous learning across boundaries and, at its best, boosts an innovation ecosystem, which accelerates the transformation of the world of work and development of competent workforce.
Furthermore, transdisciplinary co-operation, for instance co-operation between engineering and education sciences like in this case, can open new perspectives to complex development processes, and bring human factors, such as motivation, well-being and learning behavior, into the focus of the technological disruption.
In the future, it will be interesting to study scaling-up collaborative robots in a wider technological context and investigate the elements that support and challenge the human-cobot competence development.
Authors
Essi Ryymin, Research Manager at HAMK Edu & Principal Lecturer at School of Professional Teacher Education
Milan Gautam, Development Engineer in HAMK Tech /Robotics Research Group
Tapio Väisänen, Principal Lecturer in Mechanical Engineering and Production Technology Degree Programme
References
ABB. (n.d.). ABB Robotics. Retrieved May 16, 2019 from https://new.abb.com/products/robotics
Auerbach, C., & Silverstein, L.B. (2003). Qualitative Data: An Introduction to Coding and Analysis. New York University Press: ProQuest Ebook Central.
Clark, H. H. (2006). Context and common ground. In K. Brown (Ed.), Encyclopedia of language and linguistics (pp. 105–108). Oxford: Elsevier.
Colgate, J. E., Edward, J., Peshkin, M. A., & Wannasuphoprasit, W. (1996). Cobots: Robots for Collaboration with Human Operators. Proceedings of the International Mechanical Engineering Congress and Exhibition, 58, 433–39.
Fanuc Global (2017). Robot products. Retrieved May 16, 2019 from https://www.fanuc.com/product/robot.html
HAMK. (n.d.). Future Work Research and Development. Retrieved May 25, 2019 from https://www.hamk.fi/research/hamk-edu/future-work-research-and-development/?lang=en
Kitzinger, J. (2005). Focus group research: Using group dynamics to explore perceptions, experiences and understandings. In I. Holloway (Ed.), Qualitative research in health care (pp. 56–69). Maidenhead: Open University Press.
Kuka. (2019). Retrieved May 16, 2019 from https://www.kuka.com
Morgan, D. L. (2002). Focus group interviewing. In J. Gubrium & J. Holstein (Eds.), Handbook of interview research (pp. 141–160). Thousand Oaks, CA: Sage.
Pedersen, M. R., Nalpantidis, L., Skovgaard Andersen, R., Schou, C., Bogh, S. Krüger, V., & Madsen, O. (2016). Robot skills for manufacturing: From concept to industrial deployment. Robotics and Computer-Integrated Manufacturing, 37, 282–291.
Schou, C., Skovgaard Andersen, R., Chrysostomou, D., Bogh, S., & Madsen, O. (2018). Skill-based instruction of collaborative robots in industrial settings. Robotics and Computer Integrated Manufacturing, 53, 72–80.
Työkaverina yhteistyörobotti. (n.d.). [A collaborative robot as a coworker] [Web log.] Häme University of Applied Sciences. Retrieved June 4, 2019 from https://blog.hamk.fi/y-robo
Universal robots. (2019). Retrieved May 16, 2019 from https://www.universal-robots.com
Vanhaverbeke, W. (2006). The Interorganizational Context of Open Innovation. In H. Chesbrough, W. Vanhaverbeke, & J. West (Eds.), Open Innovation: Researching a New Paradigm. Oxford University Press.
Vivo, G., Zanella, A., Tokcalar, O. & Michalos, G. (2017). The ROBO-PARTNER EC Project: CRF activities and Automotive Scenarios. Procedia Manufacturing, 11, 364–371.
Yaskawa. (2019). Retrieved May 16, 2019 from https://www.motoman.com
LISÄÄ AIHEEN YMPÄRILTÄ / RELATED POSTS
 Pedagogical Goals and Practical Implementations within the Finnish-Brazilian Gira Mundo Finlândia Pilot Programme
Pedagogical Goals and Practical Implementations within the Finnish-Brazilian Gira Mundo Finlândia Pilot Programme
 Developing a Hamkoid through experimentation
Developing a Hamkoid through experimentation
 Students’ experiences of collaborative learning on digital youth work cMOOCs
Students’ experiences of collaborative learning on digital youth work cMOOCs
 Brazilian teacher students’ motivation, challenges and change by doing
Brazilian teacher students’ motivation, challenges and change by doing