
Milan Gautam, Piiku Pakkanen, Francois Chritophe & Marjo Vaalgamaa
Introduction
Robotics is becoming important in social and health care. Diverse types of robotics have been developed for this context and used in many ways connected to patient monitoring and medication delivery (Kangasniemi et al., 2019). This could be one answer to the lack of a future workforce concerning global demographic change. In Finland, the number of elderly citizens is also increasing, and in 2040 there will be over 1.5 million people over the age of 65 (Statistics Finland, 2015). Introducing robotics into elderly care may not be always easy because people may have prejudices and negative attitudes towards technology and may thus be reluctant to use modern technology at work (Coco et al., 2018). However, professionals in Finnish social and health care have reported that they have trust in their ability to learn to use modern technologies (Turja, 2019).
In answer to the innovation challenges of robotics in nursing, we experimented with a multidisciplinary way of interacting with students and education programs from nursing and technology departments using a problem-based approach. This was based on a concrete practical project where students and a pedagogical team took part in applying to participate in the KUKA robotics challenge (KUKA AG, 2020). The KUKA challenge is an annual innovation challenge organized by KUKA AG in the field of robotics with specific application themes. In 2020, the challenge was for medical robotics.
Multidisciplinary means of interaction have been researched earlier. Matthews et al. (2002) report interesting results by involving nursing students in the design of nursing robotics applications. Malakooti (2018) used a multidisciplinary approach to create novel design solutions in health care; the results of this study show concepts that have potential for growth, value generation, and collaboration between the design community and healthcare.
The aim of this article is to highlight how multidisciplinary projects can lead to innovation and address current challenges in society.
Multidisciplinary Design Process
We designed a robotic application for the KUKA challenge with nursing students. The collaboration consisted of five phases: 1) exploration of available technology in robotics, 2) an innovation workshop for professionals, 3) evaluation of ideas and selection of application area, 4) visualization of the application, and 5) team building for participation in the KUKA robotics challenge.
1. Exploration of available technology in robotics
During our first session with the students, we presented a broad overview of robotics technology currently available and used in the health care sector. Typical robots presented included assistive robot technology, humanoid robots, robotic arms (especially collaborative robots), social robots that are used as companions, health, and behavior monitoring robots. We also mentioned that the concepts they would be creating would be used to participate in the KUKA robotics challenge and we presented the range of devices available in the competition.
2. Innovation workshop for professionals
Secondly, the nursing students arranged innovation workshops for professionals in one of the care homes in the city of Riihimäki in Finland (Riihikoti, the City of Riihimäki). The aim of the innovation workshop was to describe social and health care professionals’ ideas and thoughts on how to use robotics in nursing and rehabilitation. One goal of the students was also to create an enthusiastic and open atmosphere in the workshop to support the most innovative ideas.
The questions of focus in the workshops were:
- How can robotics be used in nursing and client/patient rehabilitation?
- What new kinds of robotics would benefit you in your work?
The innovation workshop was conducted for health and social care professionals working in elderly care. The possibility to participate was offered to all professionals in Riihikoti via an information letter. Eight professionals registered to participate, and six were present for the workshop. Participating in the innovation workshop was counted as informed consent for participating in development process. The participants (n = 6) were practical and registered nurses who were interested in robotics.
Initially, the participants were oriented to the purpose of the workshop and were given some information on the Robo Oppii project (Robo Oppii -Hanke – Riihimäen Kaupunki, 2020). Additionally, the concept of robotics and already available robots in rehabilitation and nursing were introduced.
Brainstorming was used as a creative method for problem solving and innovation in the workshop. This method was chosen because of its ease of use and time-friendliness. It was also expected that the method would yield as many ideas as possible. Before starting the innovating, the principles of the brainstorming method were emphasized: it was made clear that all ideas are valuable, and even peculiar/unusual/fanciful ideas would be recorded.
In the workshop, the participants first wrote their ideas and thoughts on usable robotics on sticky notes. Secondly, the participants discussed each other’s ideas together. The mutual discussion produced more new ideas on how to use robotics in nursing and rehabilitation. All the ideas were aggregated by the nursing students.
An inductive content analysis was used as an analysis method. The ideas from the sticky notes were first reduced and then grouped. These grouped ideas were finally categorized. Students formed three categories in the use of robotics concerning daily activities, challenging situations, and social interaction. These categories and their contents were introduced to the mechanical engineering representatives and were evaluated.
3. Evaluation of ideas and selection of application area
The concepts presented by the students were wide ranging and included ideas for: patients with aggressive or difficult behavior, robotic assistance during meals, moving from and into a wheelchair, patient positioning and turning in beds, pain and mood measurement, and dispensing medicine.
The evaluation of the concepts was based on the current availability of tools and resources to develop them in practice. From the proposed ideas, we selected the food and drug delivery applications, helping with patient positioning, analyzing patients’ mood and behavior, and relaxation.
4. Visualization of the robotic system
As a fourth phase, the robotic system was visualized using simulations to participate in the KUKA robotics challenge. The robotic system concept was developed that covered three different concrete nurse-patient scenarios. In the concept, the robotic system was designed so that it would be able to share information and operate as a channel between patients and nurses.
The following three areas were focused on:
- Patient positioning
The nurses need to regularly take care of positioning parts of the body especially the legs and hands for bedridden or injured patients. A robot can perform this patient positioning task with end of arm tooling and could help nurses to carry out the job in an ergonomic manner. - Medication and food delivery
One of the duties of a nurse is to provide medication and food to the patients. This may sometimes be time-consuming and from a productivity point of view, the use of a robot would be a better solution. - Relaxation
The need for relaxation is a part of long-term wellbeing. The increase in the aging population of the world makes it difficult for nurses to offer this service. A robot with a simple setup can help in this scenario. Massage and relaxation are relevant services in long-term wellbeing and care, especially among the elderly and long-stay patients. A relative share of persons aged 65 or older are increasing in the developed countries and they represent more than 40% of hospitalized adults. The economic impact of their care is high, and nurses’ resources are allocated to and focused on the most productive care instead of massage and relaxation.
Therefore, a robot with massage skills could save nurses time and offer care for patients.
These situations require a robotics system to provide situation monitoring for patients with, for instance, the real-time analysis of their mood. The delivery of medication and food entails that a robot is connected to a hospital’s schedules as well as planning and information systems. Moreover, a robot could detect patient moods and anxiety and first serve those who may need medication and food as soon as possible.
All three scenarios will be carried out by one robot system. Our idea is to increase the diversity of the use of one robotic arm and bring the concept of multi-tasking to healthcare robotics. Multi-tasking is common in industrial production robotics but novel and promising in healthcare and service robotics.
To understand our proposed solution, the following hypothesis is explained with figures.
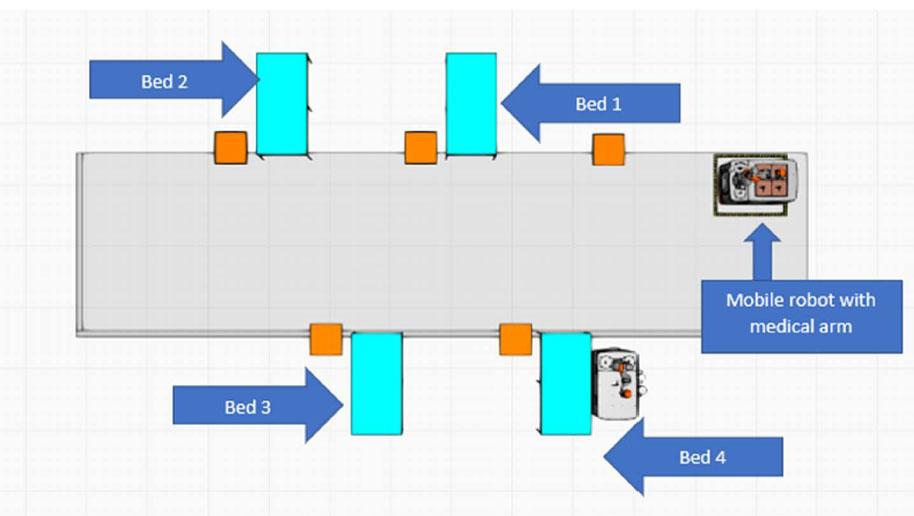
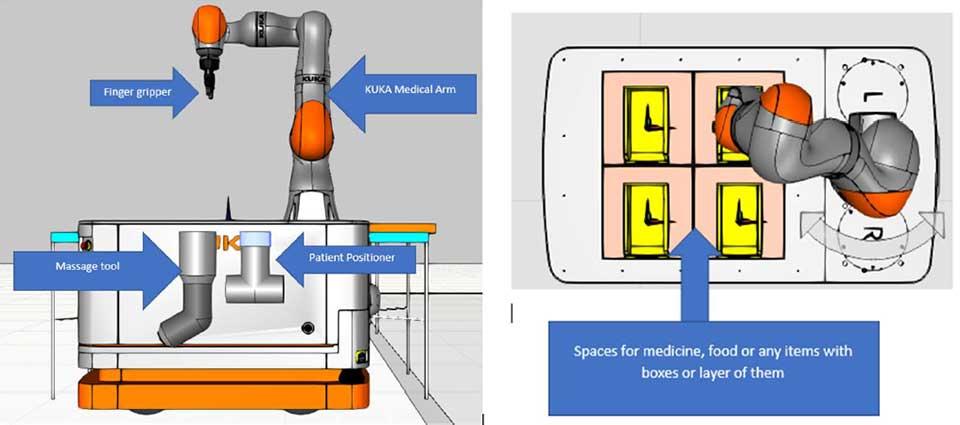
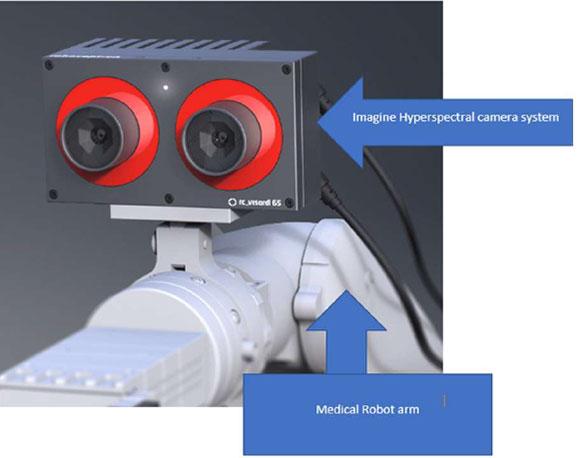
Let us imagine a rehabilitation home or a hospital with several beds as shown in Figure 1. A mobile robot with a KUKA medical arm on top will be used to work in the hospital area together with nurses or autonomously if needed. The platform is equipped with a tool changer and set of tools as shown in Figure 2. The medical arm is equipped with a hyperspectral camera system for mood and pain analysis. The conceptual idea for this is shown in Figure 3. An onboard graphical user interface will give access to software elements for the robot’s different purposes of use. The set of tools proposed are a finger gripper, massage tool, patient positioner.
5. Team building for participation in the KUKA robotics challenge
Häme University of Applied Sciences (HAMK) is an institution of higher education with seven locations in Finland. The team for the KUKA Robotics Challenge was established with a combined effort from different research units and degree programs within HAMK working in different disciplines.
The group was divided into sub-groups as follows:
A. Software team
The software team was led by a research scientist in the field of artificial intelligence and machine vision. Followed by senior lecturer in computer applications and together with two software engineers.
B. Hardware team
The hardware team was led by a professor in applied robotics, manufacturing, and production automation together with two mechanical engineers.
C. Nursing and health care team
The nursing and health care team was composed of a principal research scientist in social and wellbeing robotics together with two lecturers from a nursing degree program.
Follow-up:
The implementation of the proposed robotic system requires several experts from different fields such as robotics, artificial intelligence, computer vision, software development, and nursing. Only these experts combined can develop the proposed concept.
The implementation of the concept requires resources, and in this case, it was assumed that the hardware resources could be provided by the KUKA robotics challenge and human resources through HAMK. The solution was planned for testing in Riihikoti.
Conclusion
In this paper, we proposed a new way of interacting with students and education programs with a problem-based approach. The purpose of this interaction was twofold: 1) involving nursing students early in their careers in the design of robotics applications useful for their everyday work, and 2) using the results of their ideation to participate in the KUKA robotics challenge.
Our approach has brought more awareness of existing robotics technology to students in the field of nursing and healthcare. In this way, we contribute to the acceptance of robotics technology already from the start of young professionals’ careers. In addition, this first initiative started a multi-disciplinary collaboration between nursing and engineering professionals. This type of collaboration is beneficial in the proposition of useful innovation which is relevant to participate in innovation challenges such as the KUKA robotics challenge. Even though the results of the KUKA robotics challenge were not positive, reviewers have shown interest in supporting our collaboration in the future.
The purpose of multidisciplinary teams is to bring social robotics into fruitful use by nurses. We aim to continue with this process with the following next phases:
- Implementing the first concept
- Conducting a usability test at Riihikoti
In this way, students who proposed the initial ideas will get to see their final development and potentially their use in a working environment tested.
In our next implementation of this design process, we will ask from the students on their opinion towards robotics before and after the ideation workshop. By interviewing students, we hope to gain more insight also into the benefits and limitations of applying this multi-disciplinary approach.
Authors
Milan Gautam is development engineer at HAMK Tech. He is developing research on the application of robotics, especially collaborative robotics used in various fields of application. After graduating in engineering from HAMK, he is now pursuing M.Sc. studies in Mechatronics at Aalto University School of Engineering. His interest and curiosity and different domains makes him an excellent partner in multi-disciplinary projects.
Piiku Pakkanen is lecturer in nursing and healthcare. Her areas of expertise are oriented on health and well-being of the adult population, occupational health care work and care for the elderly. My interests are e.g. professional ethics in nursing, changing health services and the utilization of welfare technology, robotics in nursing, nursing management and development.
Francois Christophe is leading the Robotics group as principal researcher at HAMK Tech. His research interests evolve around collaborative robots, machine vision, swarm robotics, autonomy and artificial intelligence.
Marjo Vaalgamaa, (Project manager, HAMK) is project manager in Robo Oppii and other related projects. She is particularly interested in the development of educational models, business collaboration and agile experimentation.
References
Call for participation in the Innovation Award 2020 | KUKA AG (2020). https://www.kuka.com/en-de/press/news/2019/07/innovation-award-2020-call-for-participation
Coco, K., Kangasniemi, M., & Rantanen, T. (2018). Care Personnel’s Attitudes and Fears Toward Care Robots in Elderly Care: A Comparison of Data from the Care Personnel in Finland and Japan. Journal of Nursing Scholarship, 50(6), 634–644. https://doi.org/10.1111/jnu.12435
Kangasniemi, M., Karki, S., Colley, N., & Voutilainen, A. (2019). The use of robots and other automated devices in nurses’ work: An integrative review. International Journal of Nursing Practice, 25(4), 1–14. https://doi.org/10.1111/ijn.12739
Matthews, J. T., Thrun, S., & Dunbar-Jacob, J. (2002). Robotic assistive technology for community-residing older adults and persons with disabilities: An interinstitutional initiative for students in the health and technology fields. International Conference on Engineering Education, September 2015. http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.13.4580&rep=rep1&type=pdf
Riihikoti – the city of Riihimäki (2020). https://www.riihimaki.fi/palvelut/sosiaalipalvelut/vanhuspalvelut/ymparivuorokautinen-hoito/riihikoti/
Robo oppii -hanke – Riihimäen kaupunki. (2020). https://www.riihimaki.fi/robotiikka-riihimaki/robo-oppii-hanke/
Roboception. (2020). https://roboception.com/en/
Statistics Finland. (2015). Official Statistics of Finland (OSF): Population projection [e-publication]. ISSN=1798-5153. http://www.stat.fi/til/vaenn/2015/vaenn_2015_2015-10-30_tau_001_en.html
Turja, T. (2019). Accepting Robots as Assistants: A Social, Personal, and Principled Matter.



